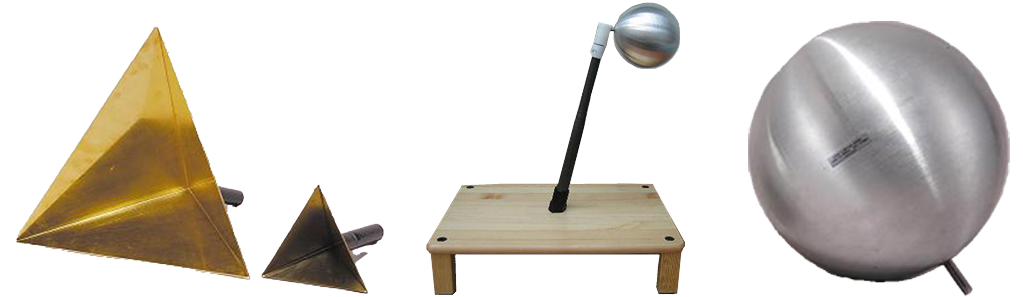
1.雷达标准目标
| 1-1. 雷达标准目标(球型/三角锥/角反射器)[RES02] | 1-2. 硅胶模型(硅胶模型) [EMA06] | ||||||||||
|

・转空极为方便。 |
2. 车载雷达/毫米波雷达评估(汽车用)
2-1. 生产线用雷达测试系统
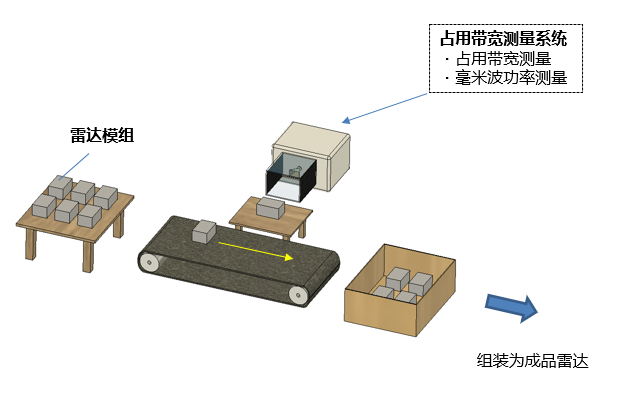
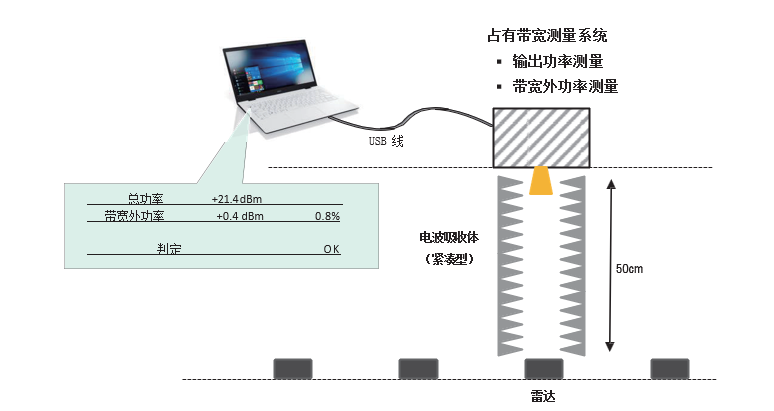
| 2-1-1.生产线用雷达测试系统 [RFTS01] | 2-1-2. 占用带宽测试系统 [OBW01] | ||
 |
 |
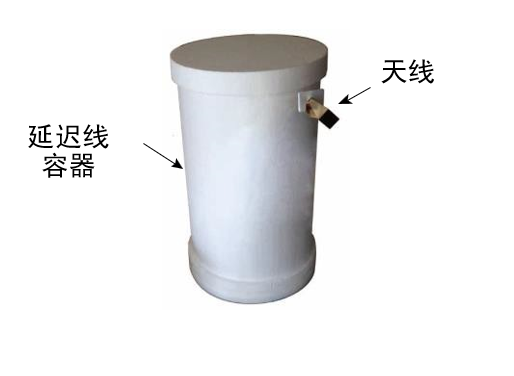
| 2-1-3. 波形分析系统 [ME7220-05/07] | |
|
适合于雷达的设计开发,性能评估,未知配置的雷达分析。以下雷达是这个波形分析系统对用的 ⇒校对用76-81GHz高精度FMCW雷达 |
2-2. 目标模拟器(被动式)(主要用于雷达评估)
| 2-2-1. 防撞雷达用目标模拟器(近距离用) 被动式雷达测试系统- 79,76.5,24GHz [RAT09] | 2-2-2. 用于防撞雷达的偏振目标模拟器 [RAT15] | ||
 |
 ・低损耗 ・即使频率变换,损耗也不会改变 ・无需电力支持 |
2-3. 目标模拟器(主动型)
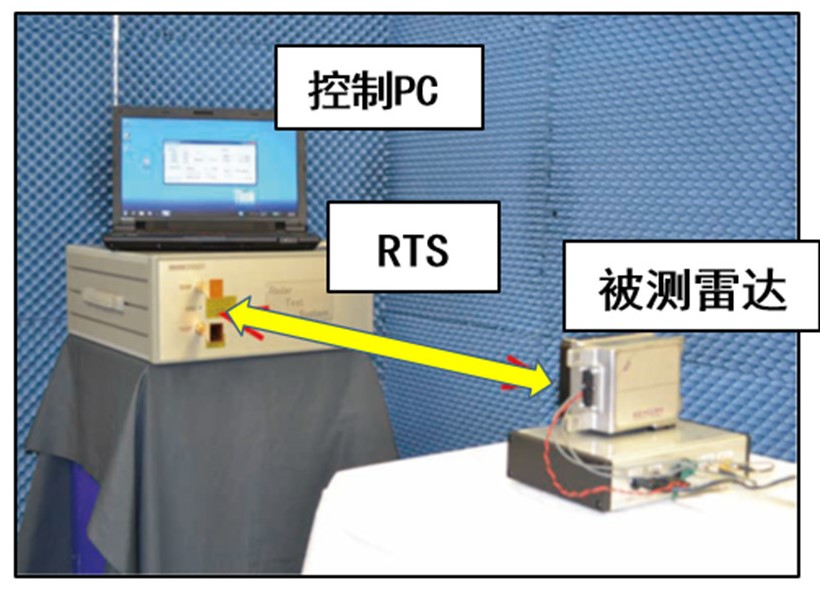
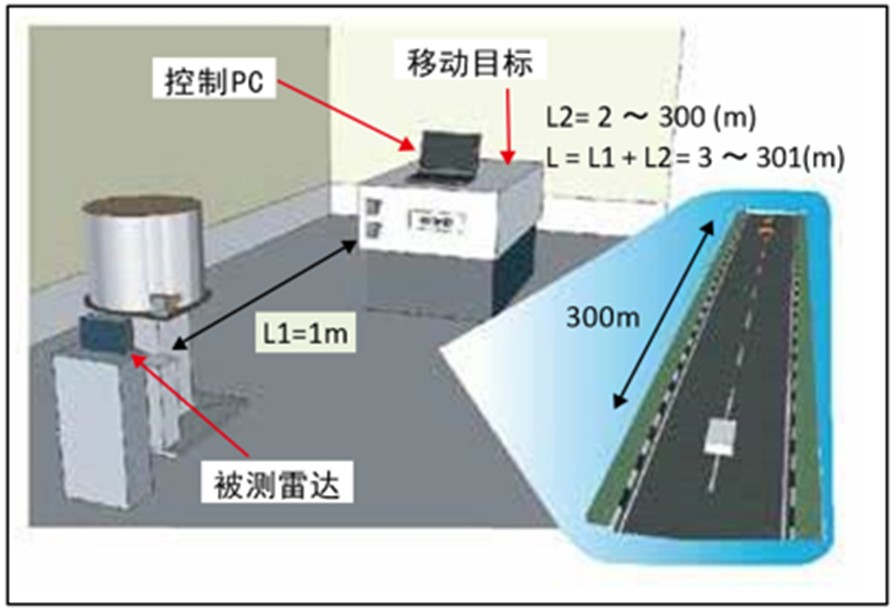
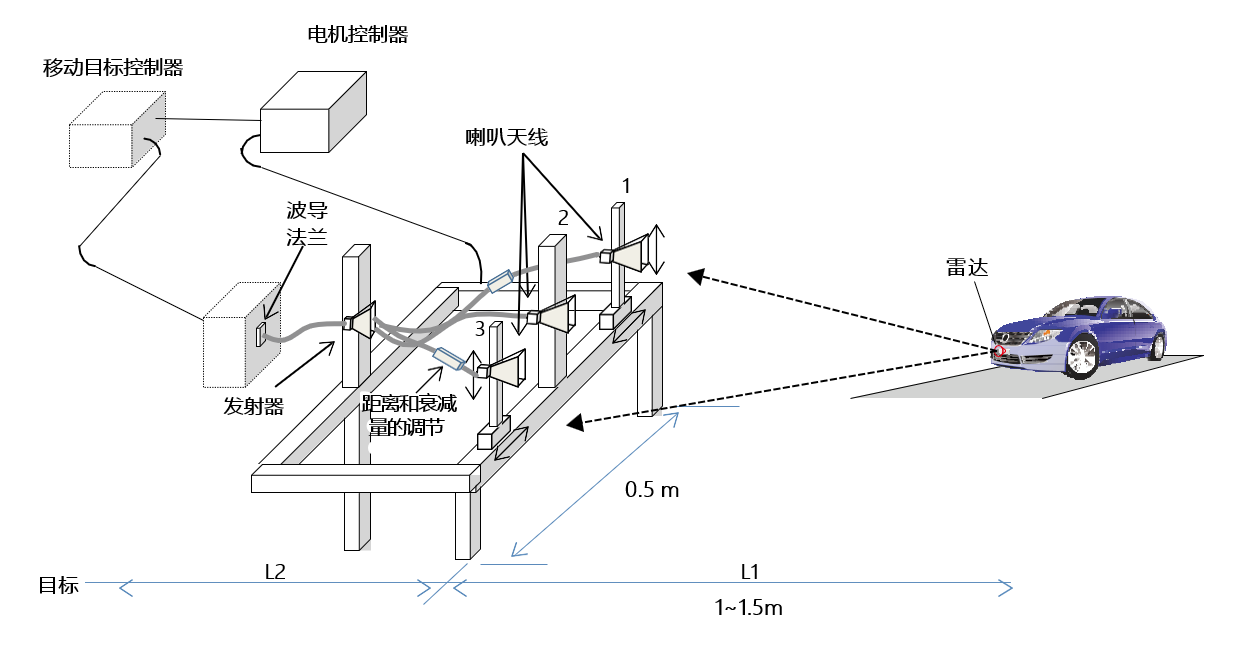
| 2-3-1. 防撞雷达用目标模拟器(主动型,远距离) 雷达测试系统-24,76.5,79GHz ME7220A [RAT01] | 2-3-2. 防撞雷达目标模拟器(模拟,远距离)雷达测试系统,移动目标ME7220E/F [RAT10] | ||
 |
 此产品的优越性能已被继承并升级到了 RTS-DM-3 |
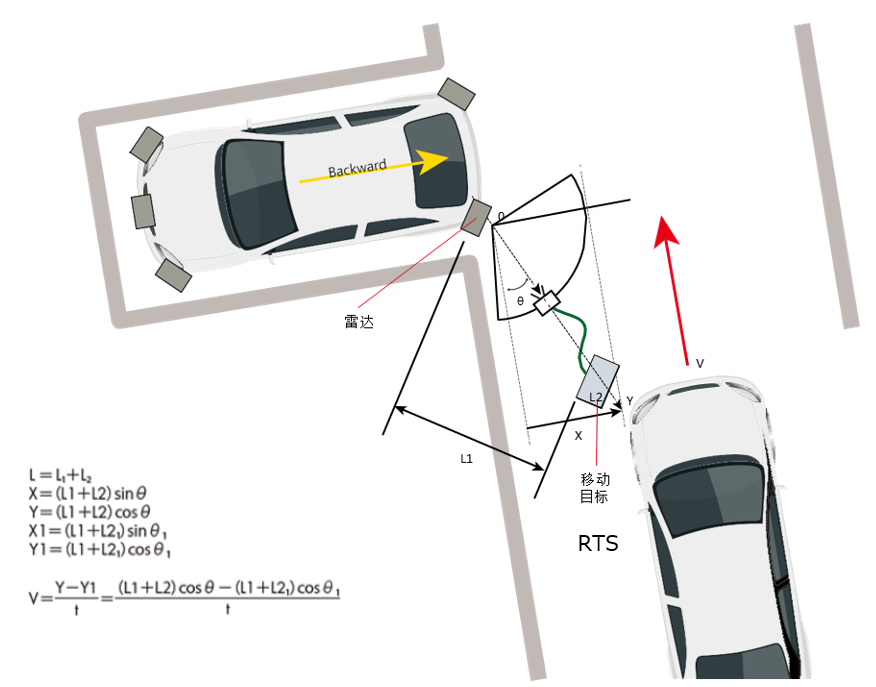
| 2-3-3. 防撞雷达目标模拟器(Digital-Delay),移动目标 [RTS-DM-3] | 2-3-4. 汽车后部仿真系统 [ANT26] | ||
 |
 多个反射位置可在三维中进行设置,并且反射区域的位置关系也可根据距离(考虑到从远距离不断靠近)自动进行控制 |
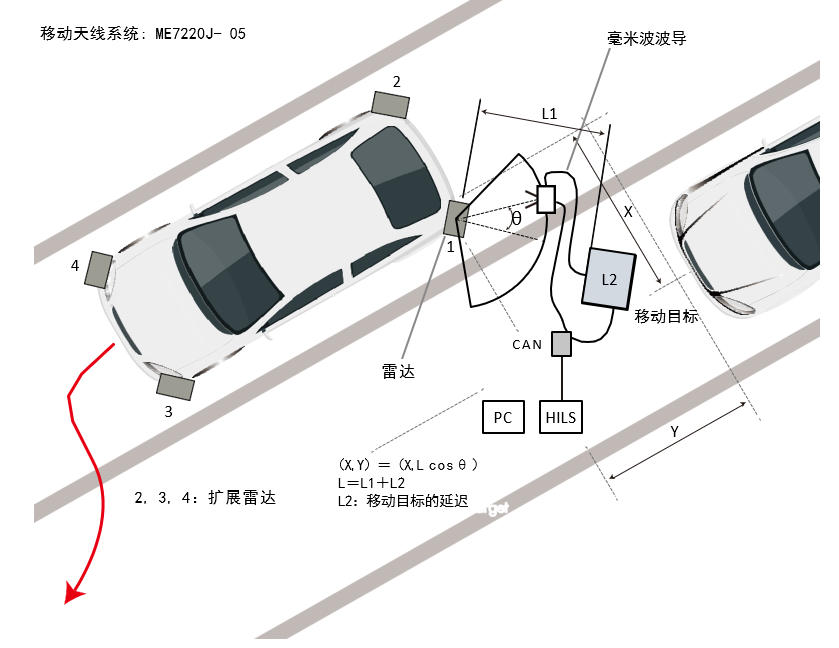
| 2-3-5. 模拟车道变换移动天线系统 [RAT19] | 2-3-6. 侧面雷达模拟器 [SRS01] | ||
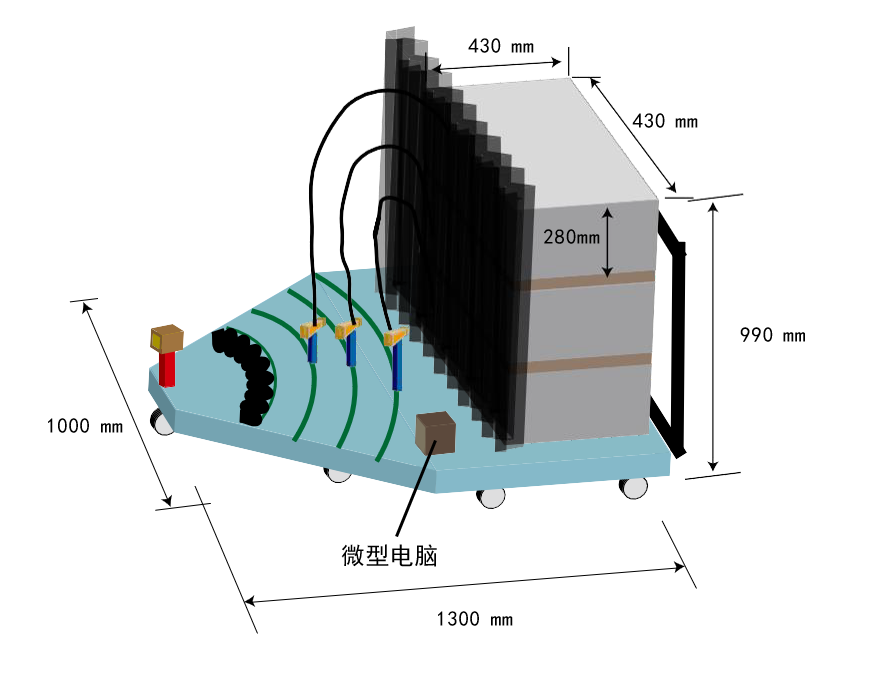 |
 |
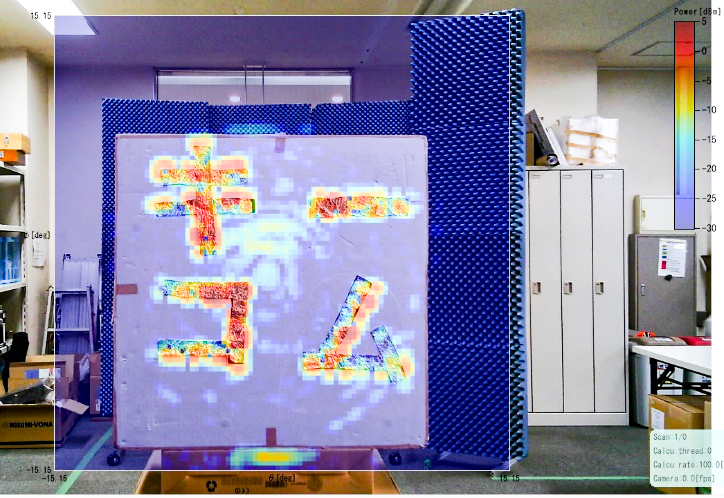
| 2-3-7. 进道目标模拟器 [SRS02] | 2-3-8. 成像雷达 [RCS05] | ||
 |
 |
| 2-3-9. 成像雷达(高精度类型)[RCS11] | 2-3-10. 合成孔径成像雷达(SAR)[RCS20] | ||
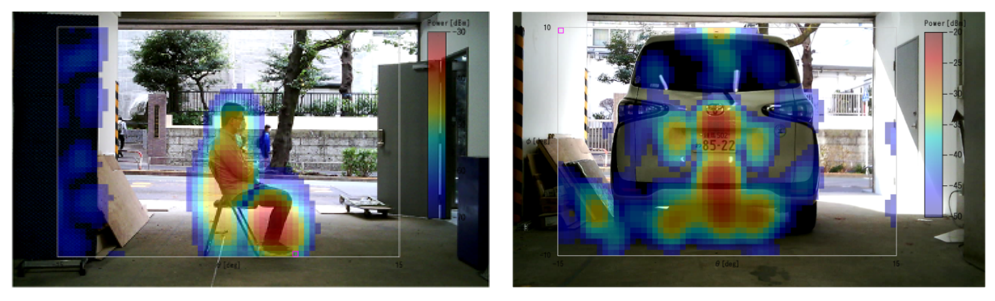 可以选购照相机,将照相机拍摄的图像与成像雷达取得的图像进行重叠分析。 |
 |
| 2-3-11. 环形搜索雷达 [RAD81] | |
 |
2-4. 搭载车载雷达汽车的改善
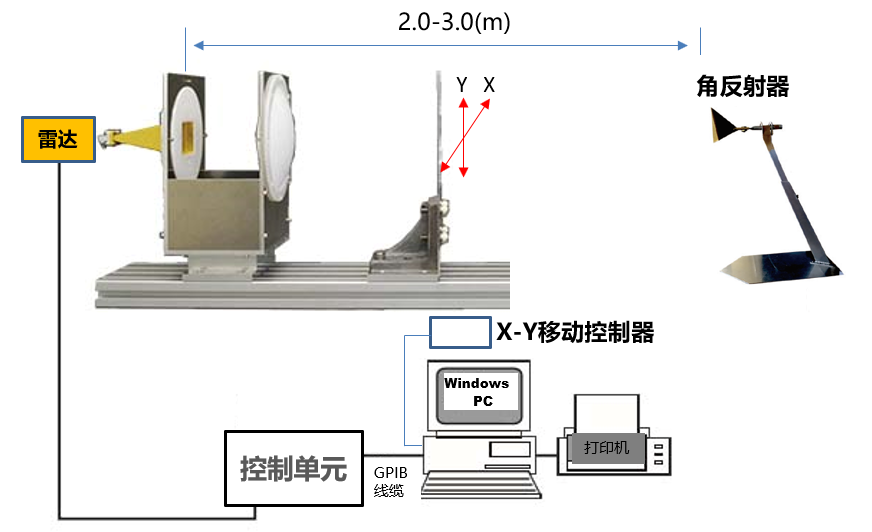
| 2-4-1. 透镜聚焦类型反射衰减测量系统 [EAS05] | |
 |
3. 传感器融合类型 自动驾驶测试系统
| 3-1. 融合测试系统 [SRS05] | 3-2. EMC投影仪 [ANTIEMC-PROJECTOR-01] | ||
 |
 |
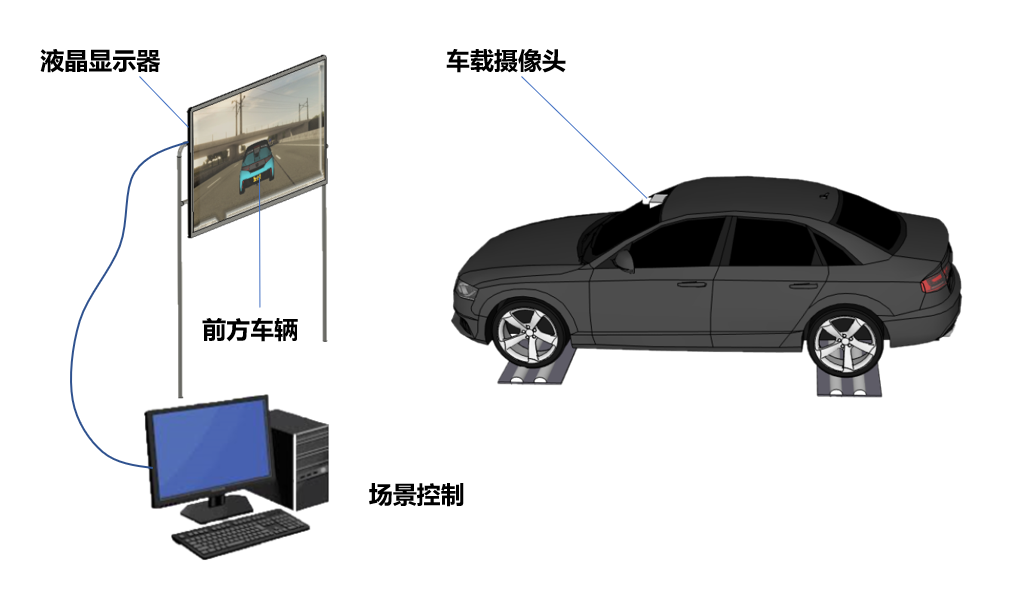
| 3-3. 自动驾驶系统 [SDR02] | 3-4. 室内ADAS测试系统 [ATS02] | ||
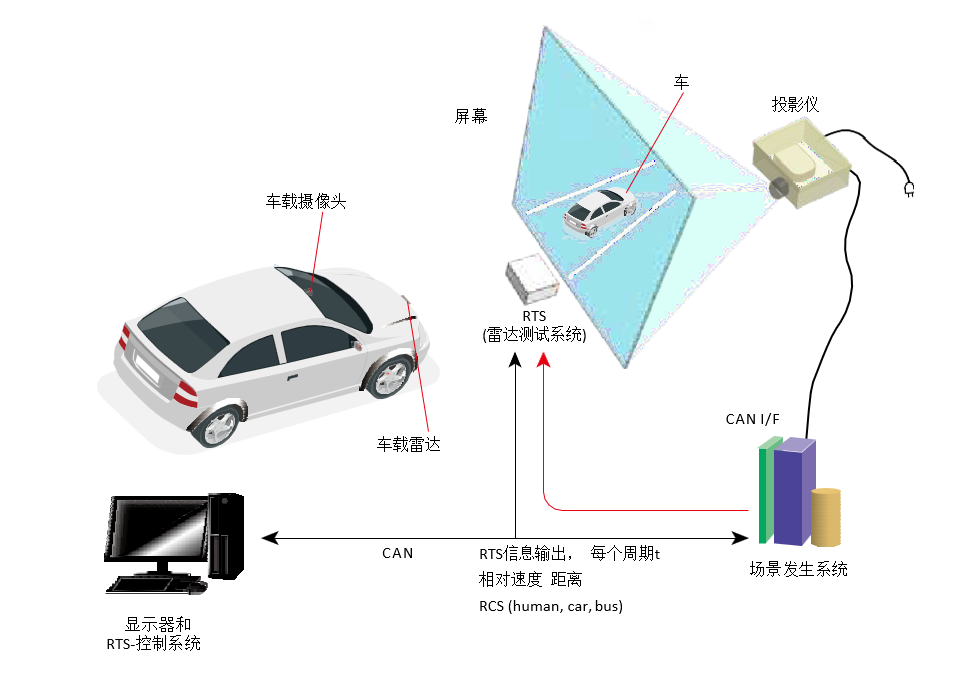
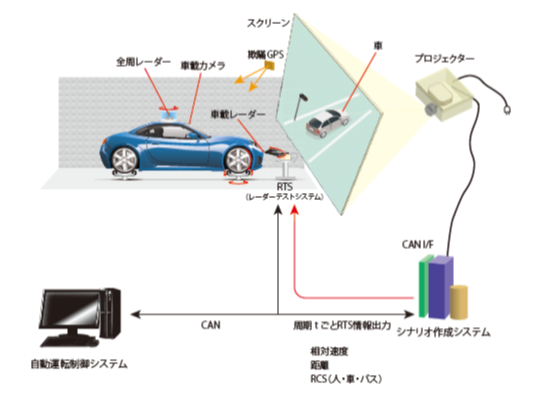 通过操作自动驾驶控制系统,场景发生系统还传送信息,例如距离,速度和RCS(无线电波发射强度)到RTS(雷达测试系统)和投影仪,并与前方投影在屏幕上的信息同步,随后RTS将反射波发射到雷达。可以通过增加场景信息,包括红灯停车等。 |
 此系统测试这些功能是否在各种测试场景中正常运行。 |
| 3-5. ADAS的EMC测试系统 [ATS01] | |
 |
4. 汽车出货检查
| 4-1. 雷达上下偏移测试系统 [EES03] | 4-2. 成像雷达,用于地面反射对策的[RCS09] | ||
 即使雷达在车标后面看不见,也能知道雷达的高度。 |
 |
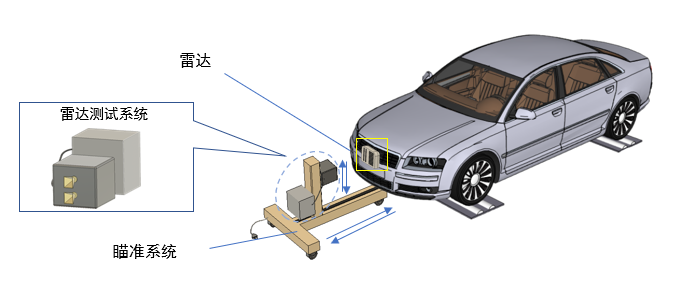
| 4-3. 汽车用近距离状况认知雷达评估(测试)系统 [RAT05] | 4-4. 点检・修理用雷达测试系统 [RTSS01] | ||
 能探知在高速行驶时从后方靠近以及变换车道时的后方有车辆的雷达。 这些雷达能用极其微弱的电波,而且在广阔空域里发射电波。 |
 除了用于产线的下线检查外,还能用于汽车修配后的检测 。 |
5. 用于在汽车检测场,汽车维修厂的测试
| 5-1. 点检・修理用雷达测试系统 [RTSS01] | 5-2. 汽车点检・修理用单反摄像头测试系统 [CTS04] | ||
|
|
 |
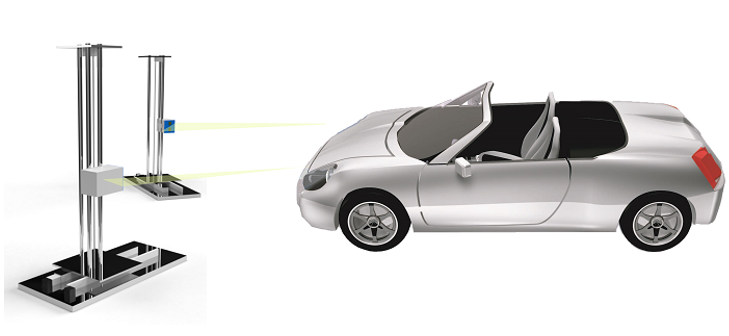
6. 车标(ACC毫米波车标),雷达罩,天线罩的评估
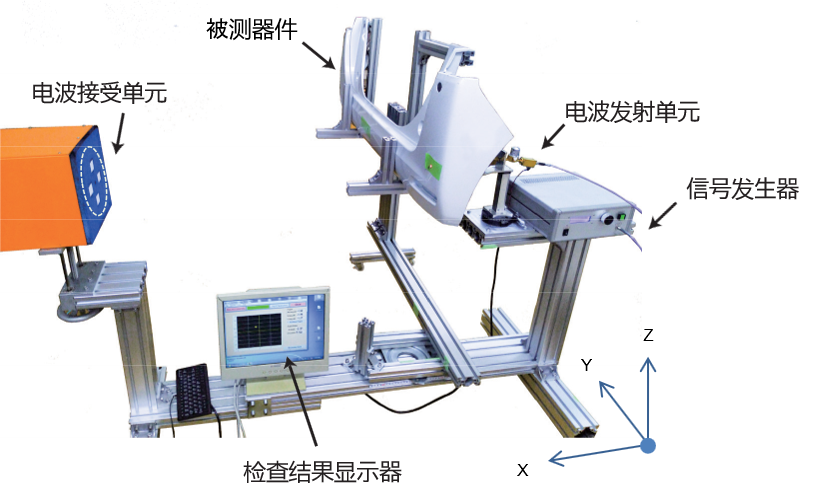
| 6-1. 车标(ACC毫米波标牌)/雷达罩测试系统 单向型,用于生产线 [EES01] |
6-2. 车标(ACC毫米波标牌)/雷达罩测试系统 单向型,用于研发 [EES04] |
||
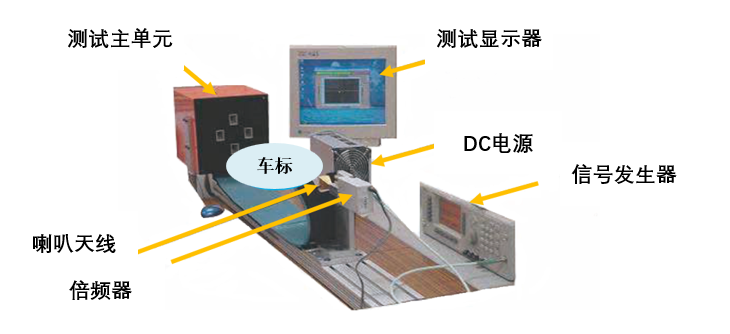 测试时间仅1,2秒,使您简便地进行透波性能等测试,也能设置此系统在车标等的生产线。 |
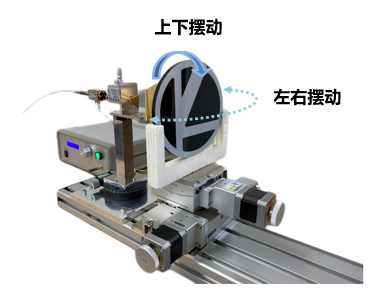 |
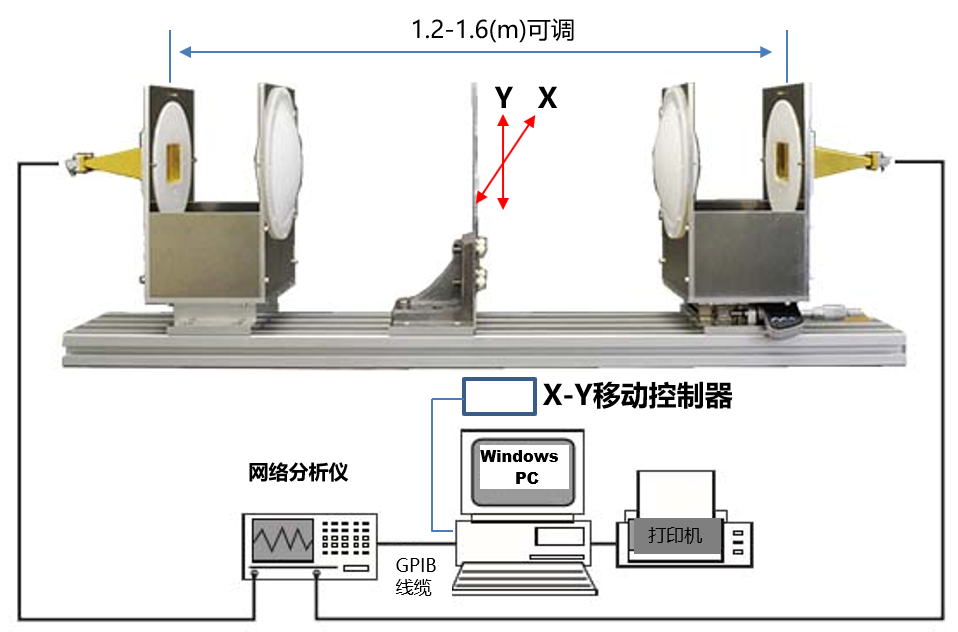
| 6-3. 车标(ACC毫米波标牌)/雷达罩测试系统 双向型,用于研发 [EES12-01] |
6-4. 车标(ACC毫米波标牌)/雷达罩测试系统 双向型,用于生产线 [EES12-02] |
||
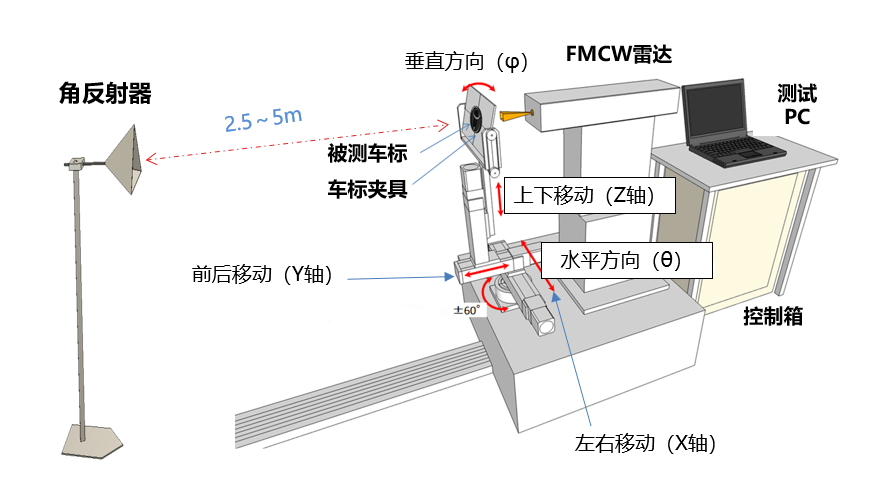 可以测量双向的传播衰减,更实际地进行透波性能测试。 |
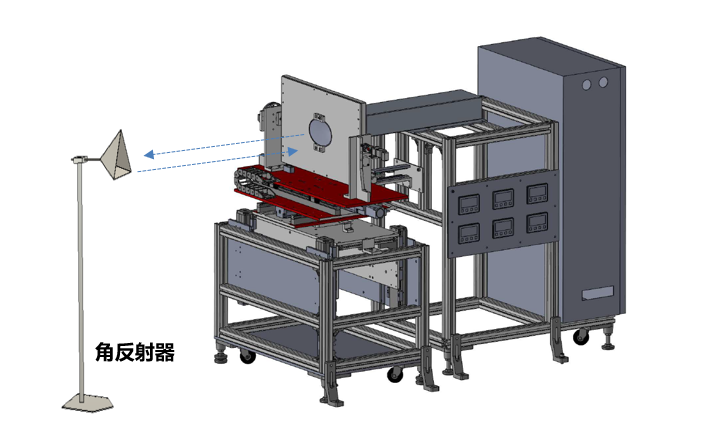 可以在水平方向上移动样件(车标(ACC毫米波标牌)等雷达罩)的中心,并沿直线测量传输衰减量和波束倾斜角(波束偏移)。 从放置⇒测量 ⇒取出车标的整个过程可以自动化,使其非常适合生产线。 |
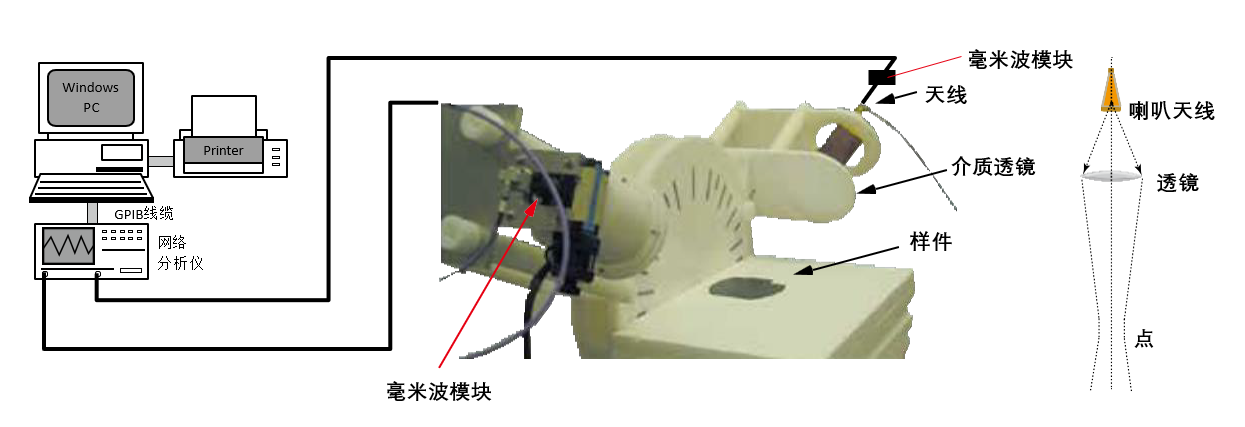
| 6-5. 车标(ACC毫米波标牌)/雷达罩测试系统 单向型,用于研发,整面测量 [EES13] |
6-6. 车标(ACC毫米波标牌)/雷达罩测试系统 双向型,用于生产线,整面测量 [EES14] |
||
 除了可以测量单向传输衰减量,还可以测量反射衰减量。 可使用矢量网络分析仔细调整频率。 |
 可测量车标(ACC毫米波标牌)的反射衰减量和双向传输衰减量。 可设置测试标准值,判定被测产品合格与否。 |
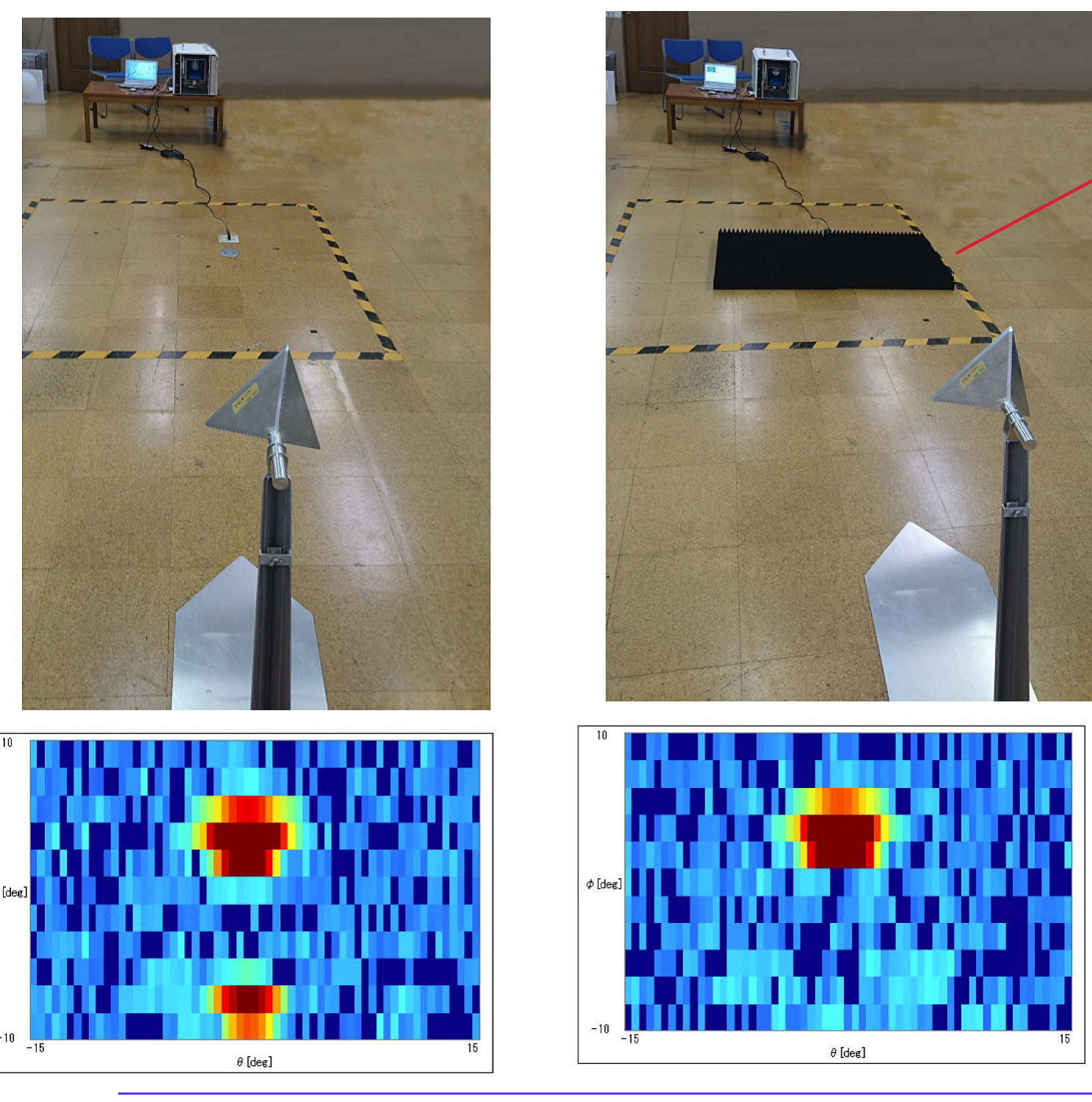
| 6-7. 毫米波罩波束偏离分布测量系统 [EES20] | 6-8. 车标(ACC毫米波标牌)/雷达罩测试系统 双向型,用于生产线,整面测量 [ANM03] |
||
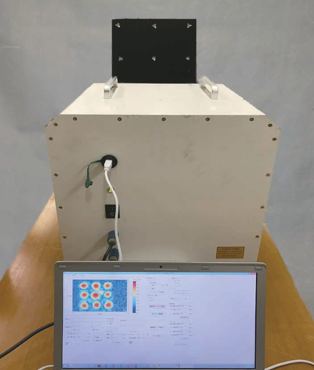 |
 在圆柱方向进行近场测量,然后测量结果变换成远场数据。 通过将电波吸收片放在被测车标的后面,适用于检查改善由于环绕无线电波而引起的图案劣化的效果。 |
| 6-9. 用于设计车标,天线罩 传输/反射衰减仿真软件 [SFW05] | 6-10. 汽车保险杠测试系统 [BES-01] | ||
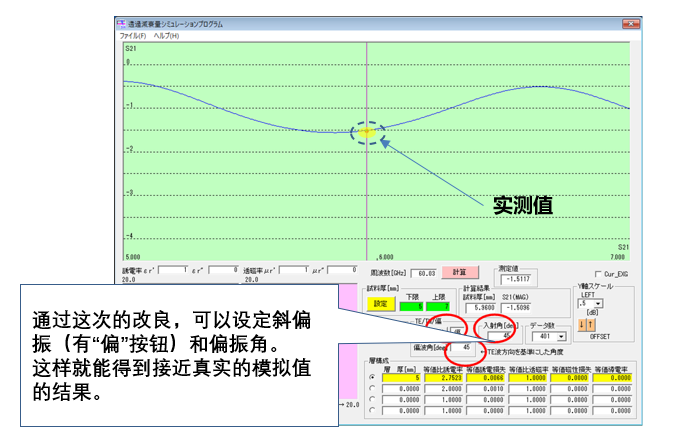 |
 ・被测器件可以在设备的纵向(X方向)、横向(Y方向)和高度(Z方向)方向上定位。 围绕高度方向(Z方向)的旋转也是可能的。 ・还可以用机械臂来测量整个保险杠上的任何精确位置。 |
7. 电波吸收片/电波暗箱/电波暗室
| 7-1. 电波吸收片(金字塔型)[EMC80] | 7-2. 电波吸收板材 [EMC83] | ||
 |
 |
| 7-3. 雷达测试恒温暗箱 [AB01] | 7-4. 电波吸收暗箱,隧道类型 [EMC85] | ||
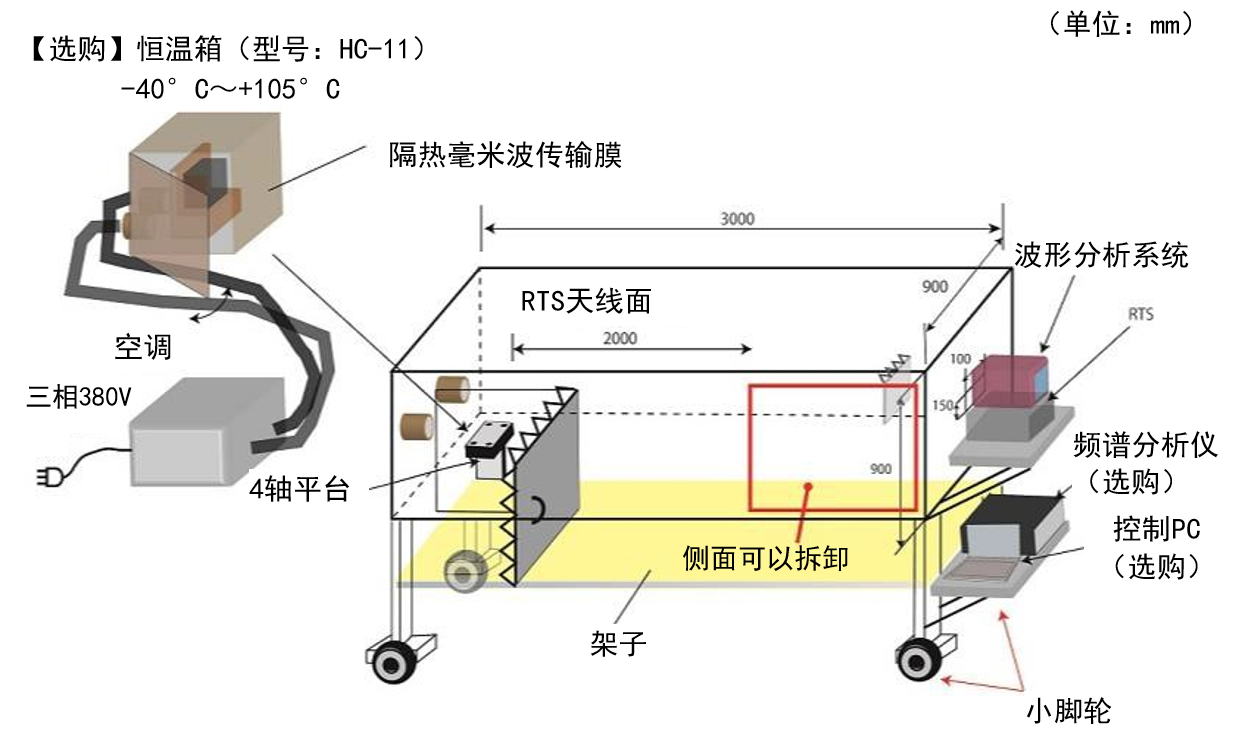 如果结合使用恒温箱(选购),可以实现-40度到+105度的测试环境,能够测试不同温度的雷达性能。 |
 |
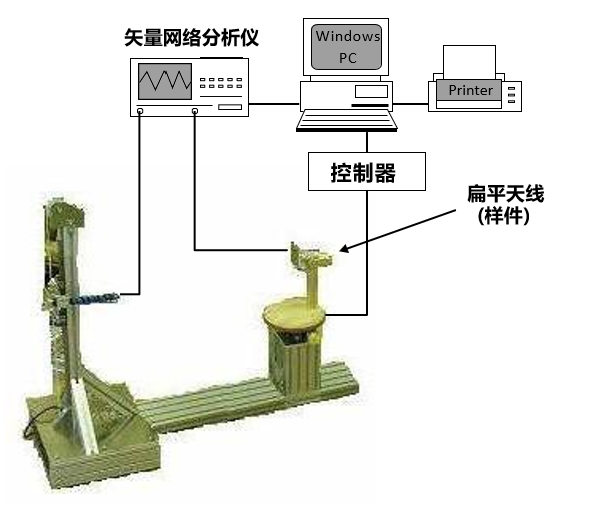
| 7-5. 3m法/10m法 电波暗室 [EMA08] | 7-6. 电波暗室无发射特性评估系统 [FSSWM02] | ||
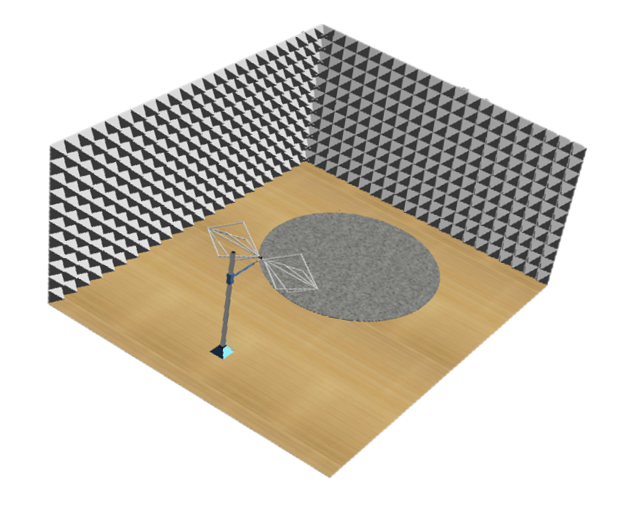 |
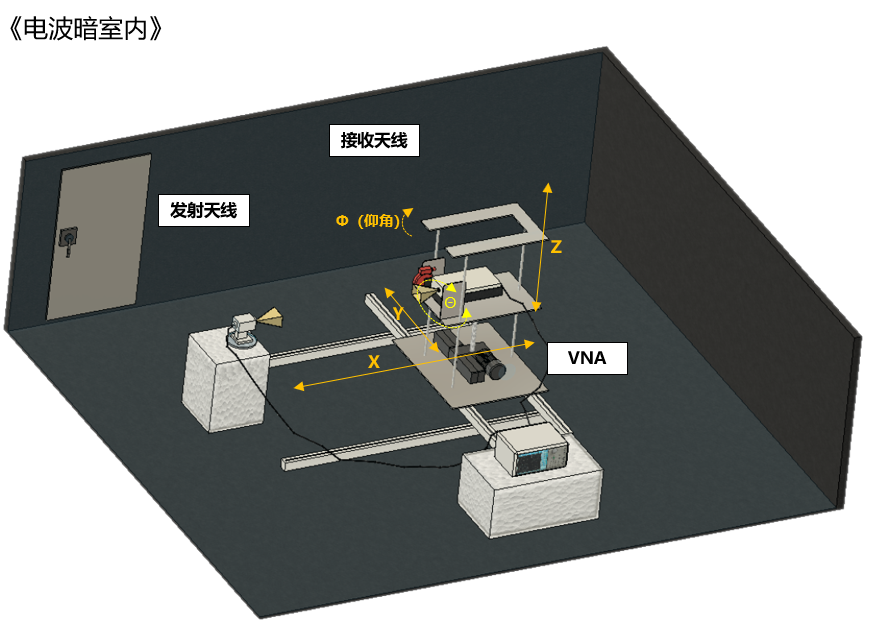 接收天线可以上下左右移动,并可以灵活调节角度,从而可以进行更精准的评估。 |