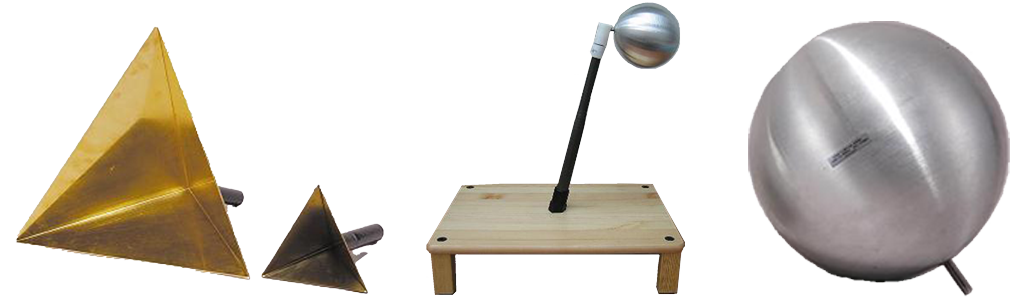
1. レーダー標準ターゲット
| 1.1. レーダー標準ターゲット(球・三角錐/コーナーリフレクター) [RES02] | 1.2. シリコーンファントム(シリコンファントム) [EMA06] | ||||||||
|
|
||||||||
|
衝突防止レーダーの走行テスト(走行試験、実走試験)、携帯電話の比吸収率(SAR)測定、ウエアラブ通信用実験などに用いる人体用ファントムで、電気定数はIEEE1528に基づいています。 容易に穴加工ができます。また、皮膚だけを分離できるようにすることもできます。ご相談下さい。 |
||||||||
| Detail! | Detail! |

2. 車載用レーダー/ミリ波レーダー(自動車用) 評価
2-1. レーダーのラインテスト
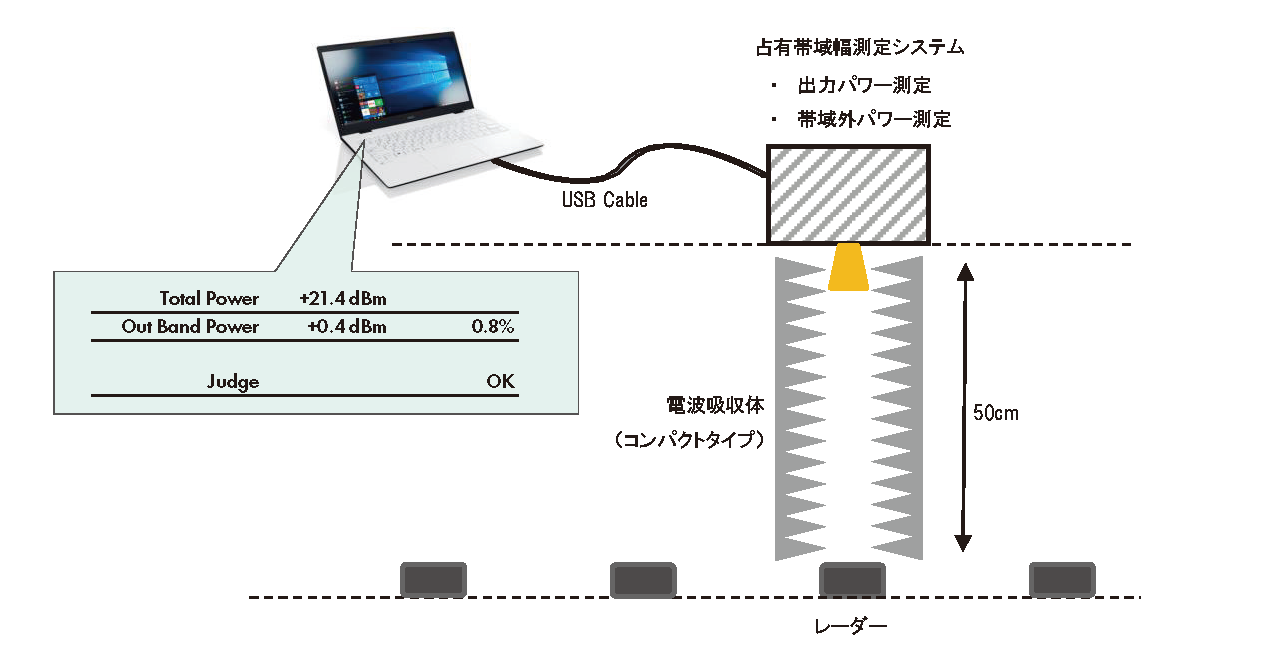
| 2.1.1. レーダー機能テストシステム [RFTS01] | 2.1.2. 占有帯域幅測定システム [OBW01] | ||
|
|
||
| Detail! | Detail! |
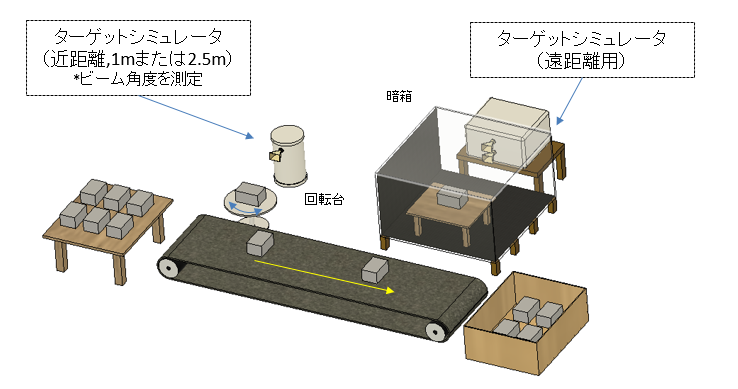
2.2. ターゲットシミュレーター(パッシヴ)(主にレーダー評価用)
| 2.2.1. 衝突防止レーダー用ターゲットシミュレーター(パッシブRTS)(近距離用)- 79GHz, 76.5GHz, 24GHz [RAT09] | 2.2.2. 衝突防止用レーダー用偏波フリーターゲットシミュレーター [RAT15] | ||
|
|
||
| Detail! | Detail! |

2.3. ターゲットシミュレーター(アクティブ)
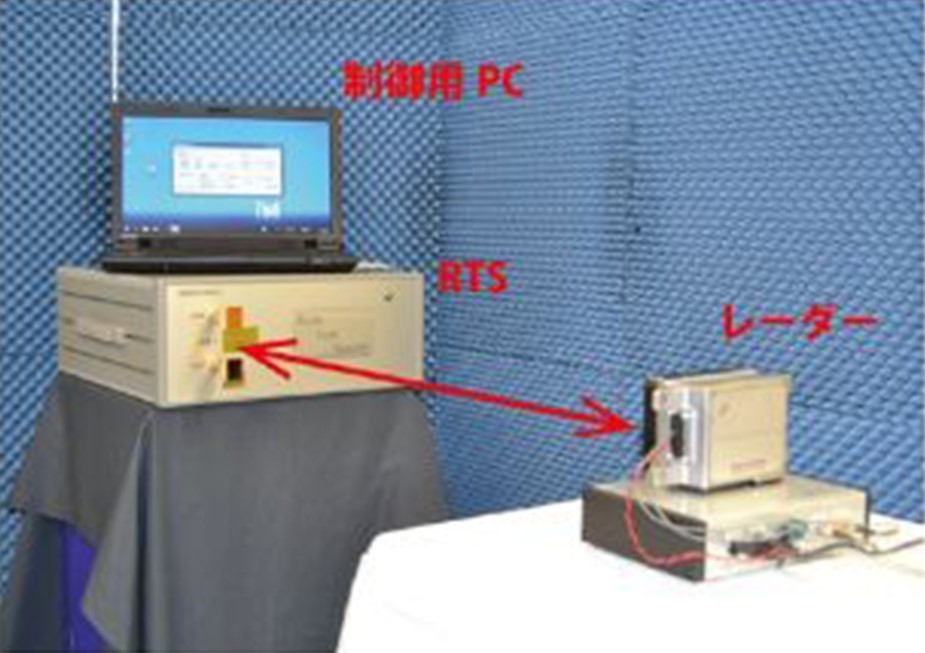
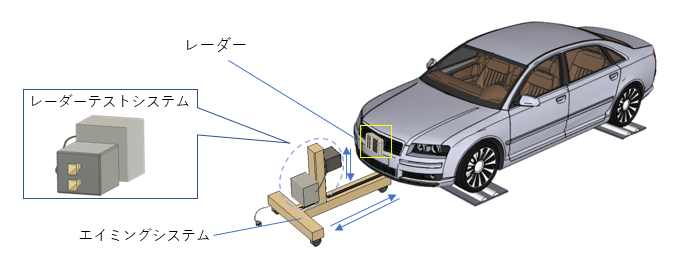
| 2.3.1. 衝突防止レーダー用ターゲットシミュレーター(アクティブ)(遠距離用) レーダーテストシステム- 24GHz, 76.5GHz, 79GHz (RTS)ME7220A (主にレーダー評価用)[RAT01] |
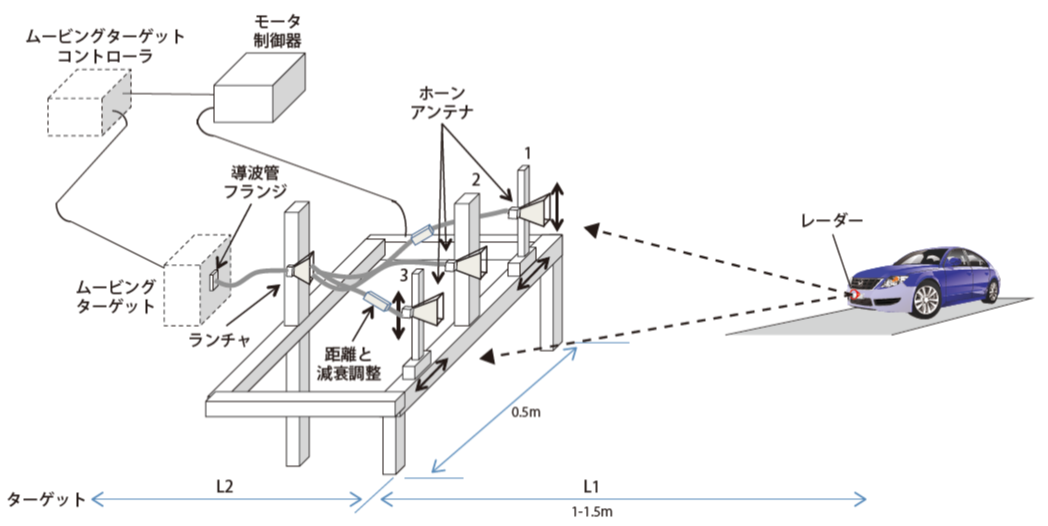
2.3.2. 衝突防止レーダー用ターゲットシミュレーター(アナログ)
(遠距離用、ムービングターゲット)ME7220E/F [RAT10] |
||
|
RTS-DM-3に機能を継承・アップグレードしています。
|
||
| Detail! | Detail! |

| 2.3.3. RTS - DM(Rader Test System Digital Delay)ムービングターゲット [RTS-DM-3] | 2.3.4. 自動車背面模擬システム [ANT26] | ||
|
|
||
| Detail! | Detail! | ||
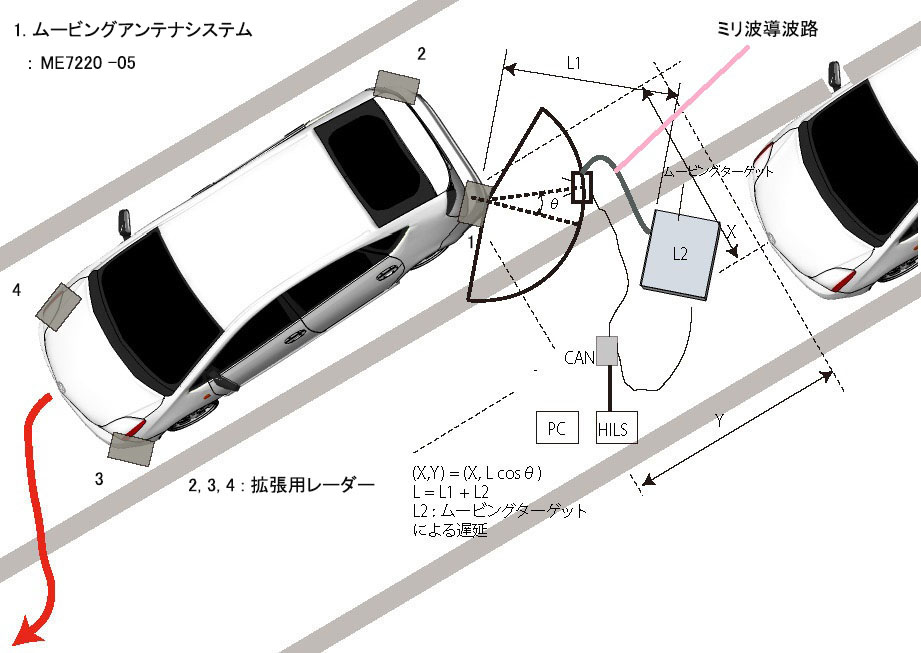
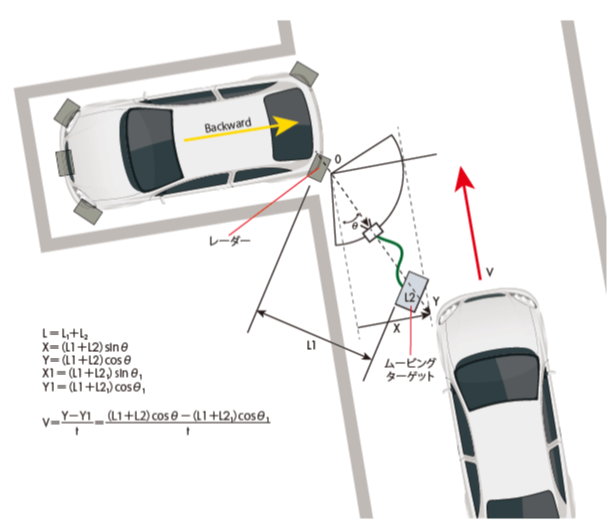
| 2.3.5. 前方走行車 車線変更検知レーダーテスト用ムービングアンテナシステム [RAT19] | 2.3.6. サイドレーダー用疑似シミュレータ [SRS01] | ||
|
|
||
| Detail! | Detail! |
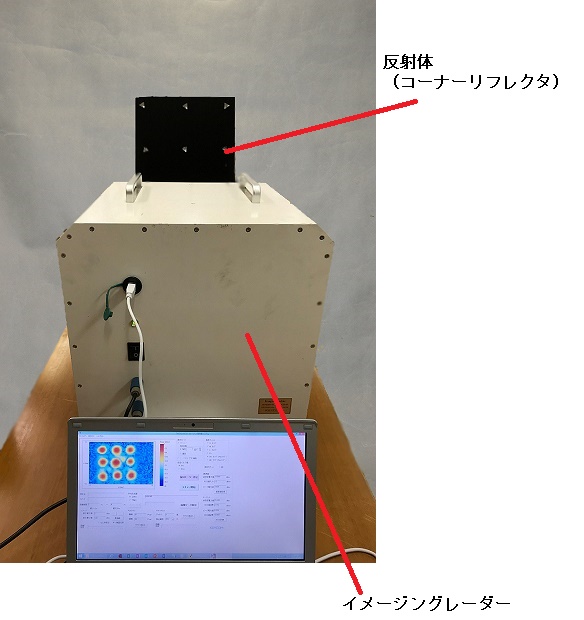
| 2.3.7. クロスロードターゲットシミュレータ [SRS02] | 2.3.8. イメージングレーダー [RCS05] | ||
|
|
||
| Detail! | Detail! | ||
| 2.3.9. イメージングレーダー (高感度タイプ) [RCS11] | 2.3.10. 耐震タイプイメージングレーダー [RCS08] | ||
|
|
||
| Detail! | Detail! | ||
| 2.3.11. 全周レーダー [RAD81] | 2.3.12. 合成開口イメージングレーダー [RCS20] | ||
|
|
||
| Detail! | Detail! |

2.4. レーダー付き自動車の改善
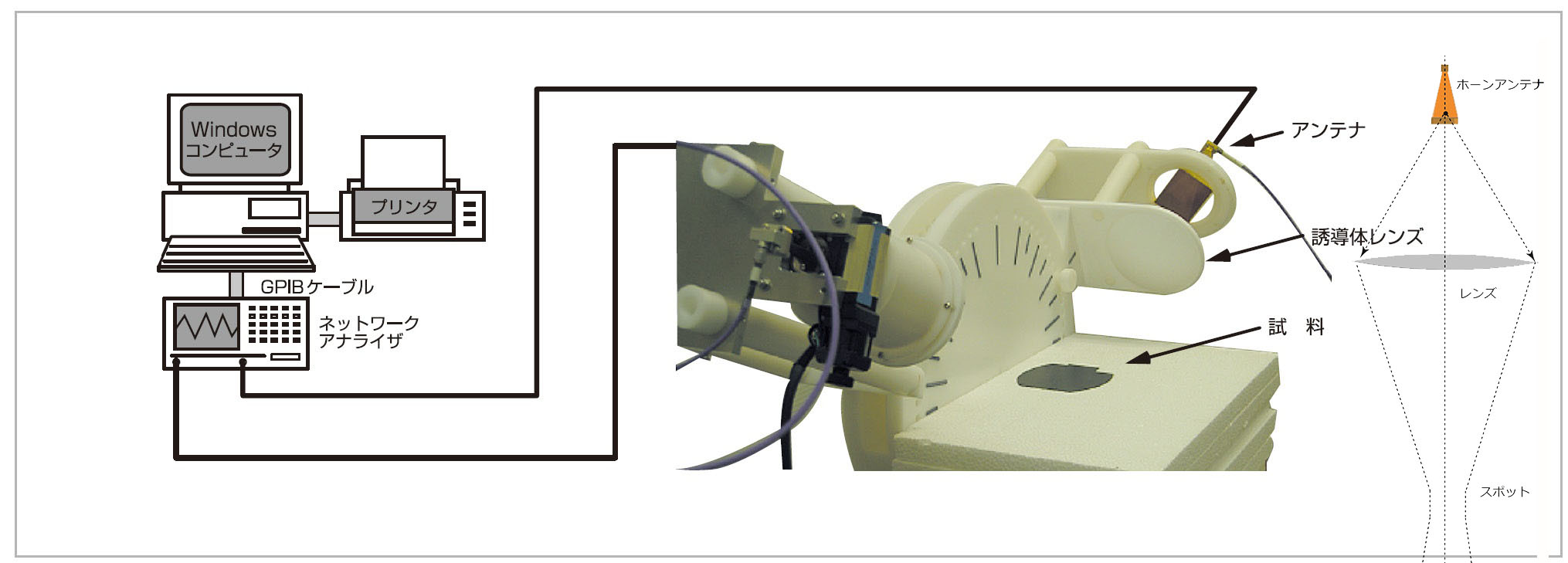
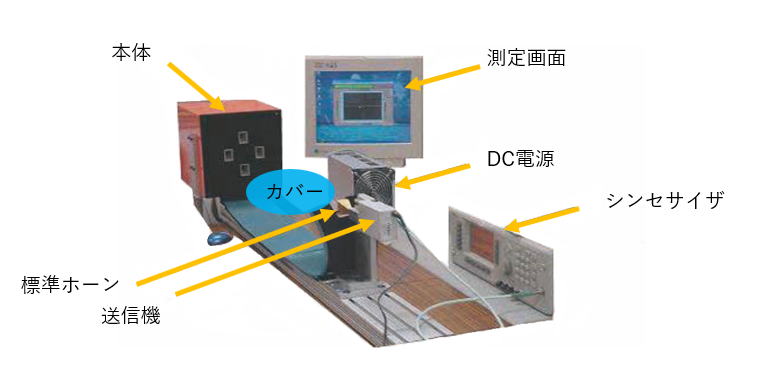
| 2.4.1. レンズフォーカスタイプ反射減衰量測定システム [EAS05] | |
|
|
| Detail! |
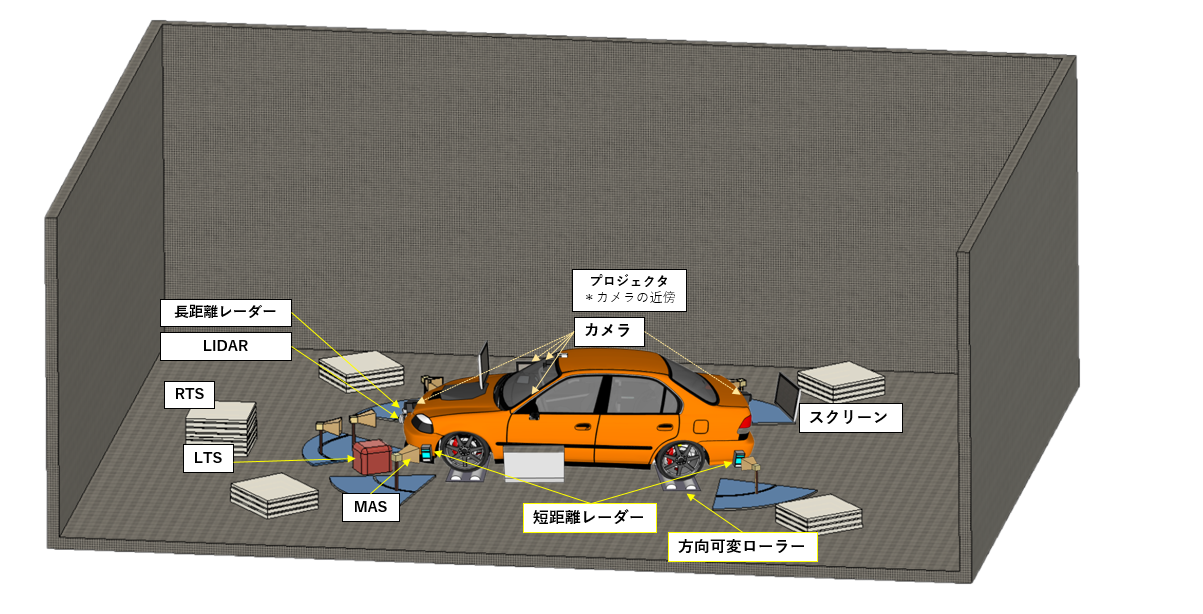
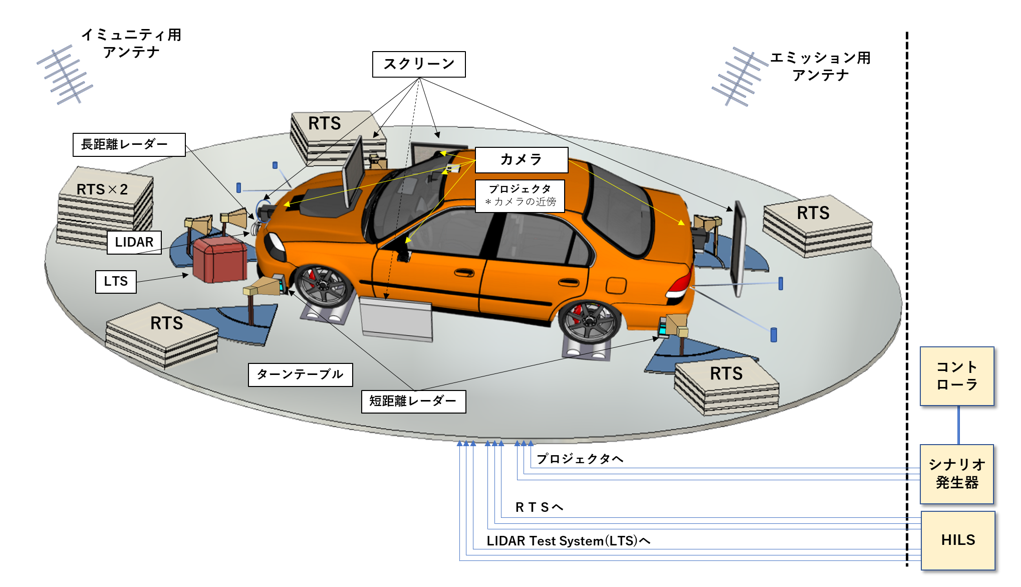
3. センサーフュージョンタイプ自動運転開発向け
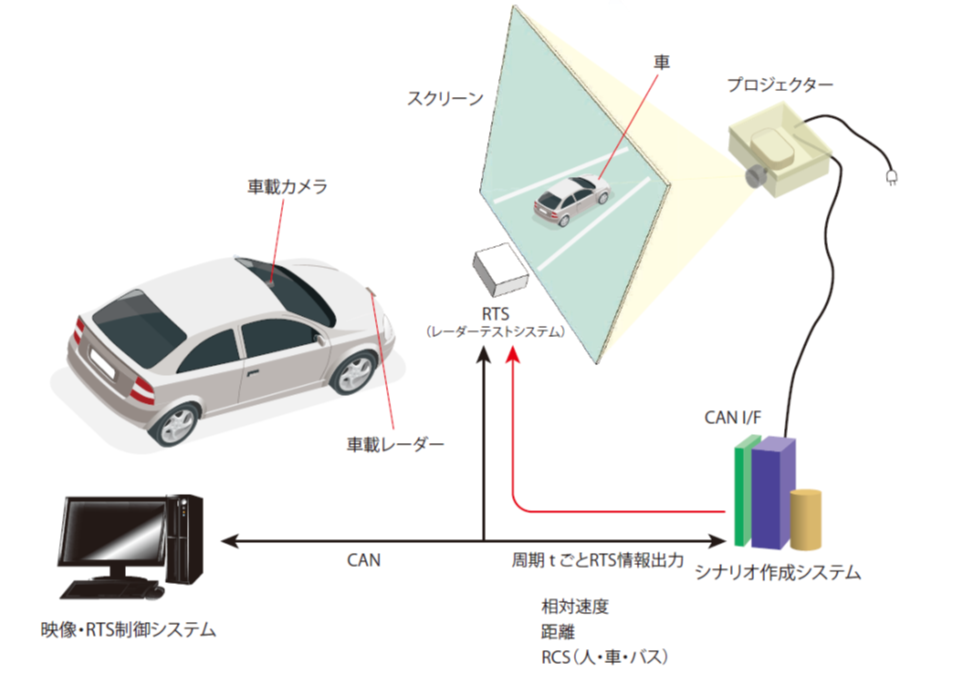
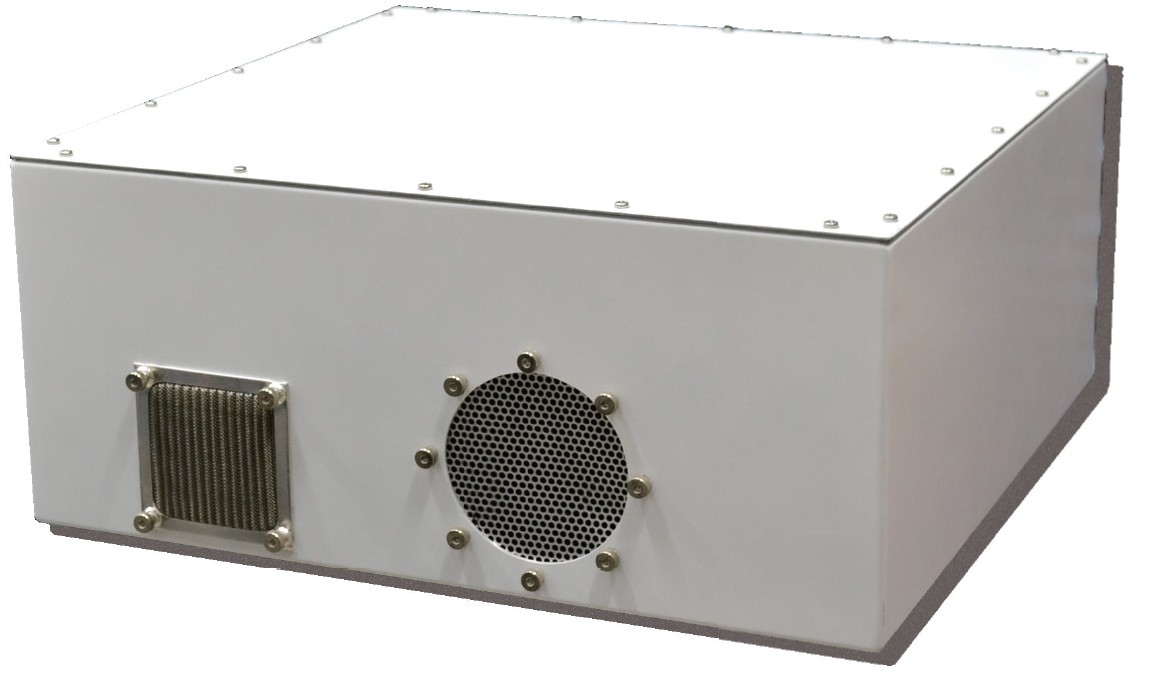
| 3.1. フュージョンテストシステム [SRS05] | 3.2. EMC対策プロジェクター [ANTIEMC-PROJECTOR-01] | ||
|
|
||
| Detail! | Detail! | ||
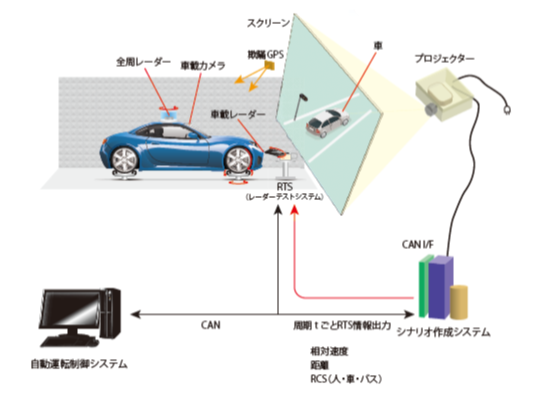
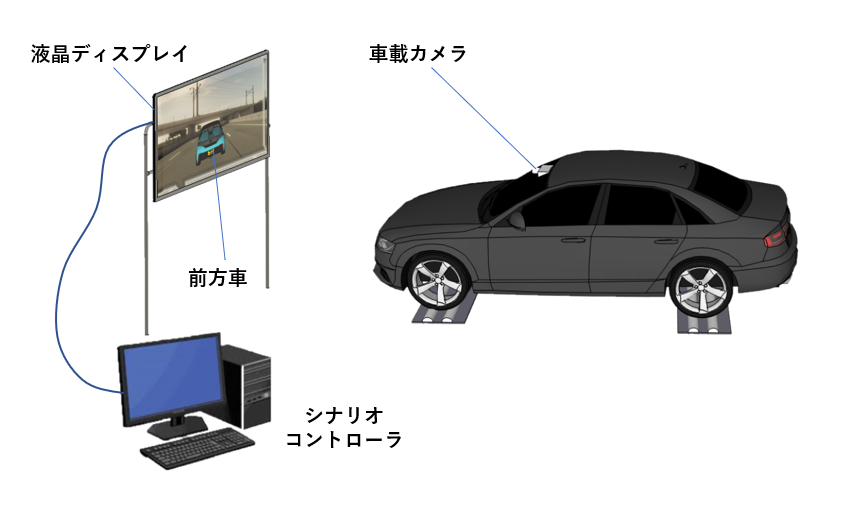
| 3.3. 自動運転テストシステム [SDR02] | 3.4. 室内ADASテストシステム [ATS02] | ||
|
|
||
| Detail! | Detail! |
| 3.5. ADASのEMCテストシステム [ATS01] | |
|
|
| Detail! |
4. 自動車の出荷時検査
| 4.1. レーダー、上下ビームずれ角度測定システム [EES03] | 4.2. イメージングレーダー [RCS05] | ||
|
|
||
| Detail! | Detail! |
| 4.3. 自動車用近距離状況認識レーダー評価(測定)システム [RAT05] | 4.4. 自動車点検・整備用レーダーテストシステム [RTSS01] | ||
|
|
||
| Detail! | Detail! |

5. 車検場・ディーラーなどでのテスト
| 5.1. 自動車点検・整備用レーダーテストシステム [RTSS01] | 5.2. 自動車点検・整備用単眼カメラテストシステム [CTS04] | ||
|
|
||
| Detail! | Detail! |
6. レドーム、エンブレム、レーダーカバー評価
|
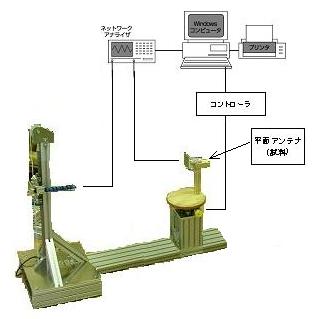
6.1. レーダーアライメントシステム(RAS) (レドーム・エンブレム測定システム) [EES01A] |
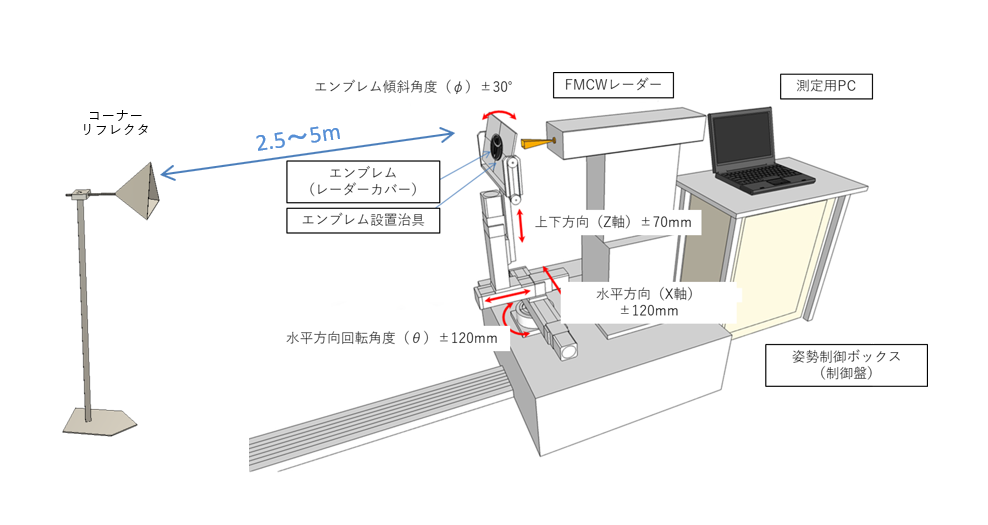
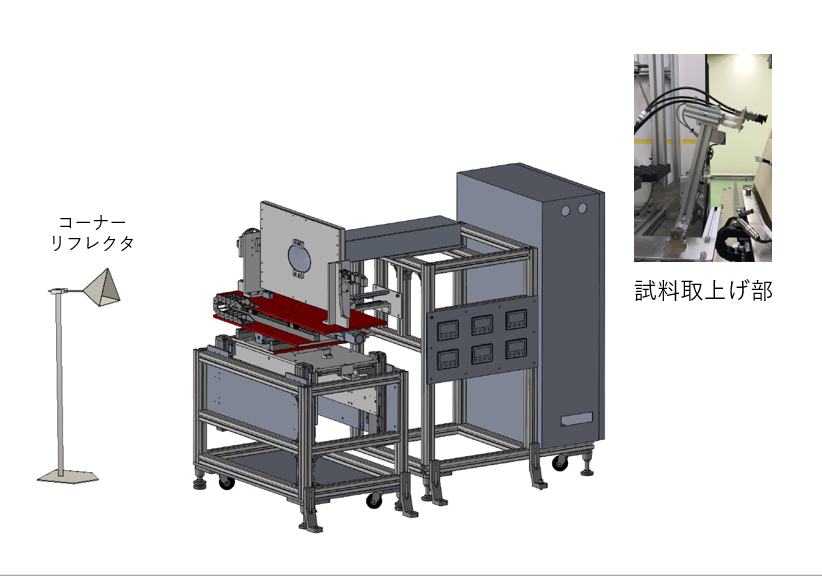
6.2. 試料設置角度可変タイプ レーダーアラインメントシステム(RAS) (レドーム・エンブレム測定システム) [EES04] | ||
|
|
||
| Detail! | Detail! | ||
|
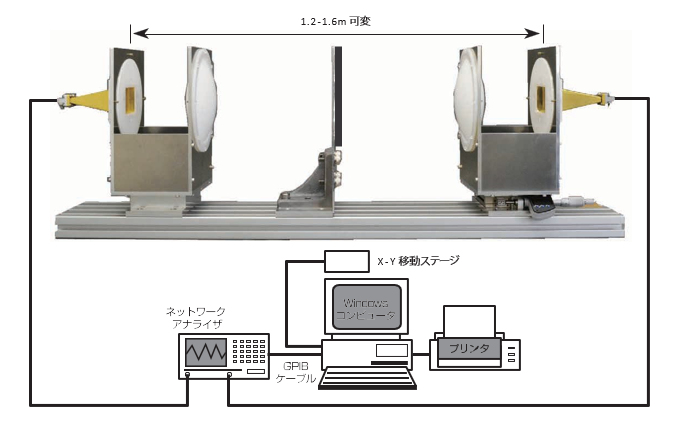
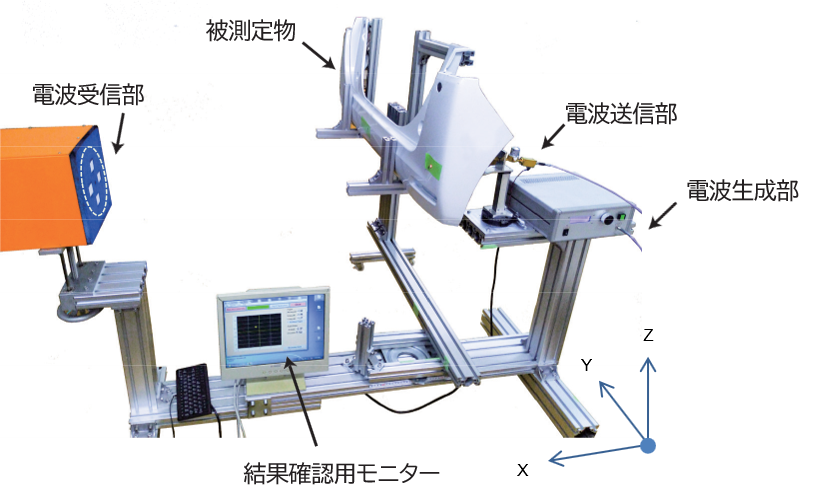
6.3. 自動車用エンブレム・レドーム評価システム (往復透過減衰量の測定可、研究開発向け) [EES12-01] |
6.4. 自動車用エンブレム・レドーム評価システム (往復透過減衰量の測定可、生産ライン向け) [EES12-02] |
||
|
|
||
| Detail! | Detail! |
|
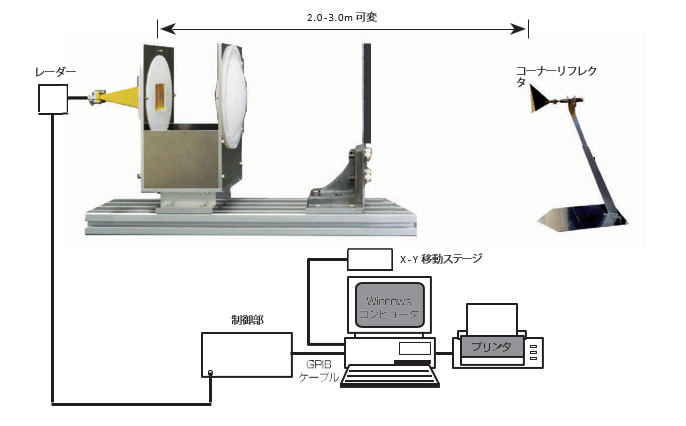
6.5. 自動車用エンブレム評価システム (反射減衰量対応、研究開発向け) [EES13] |
6.6. 自動車用エンブレム評価システム (反射減衰量対応、生産ライン向け) [EES14] |
||
|
|
||
| Detail! | Detail! |
| 6.7. ミリ波カバービームチルト分布測定システム [EES20] | 6.8. エンブレム、レドーム等によるパターン歪み測定システム [ANM03] | ||
|
|
||
| Detail! | Detail! |
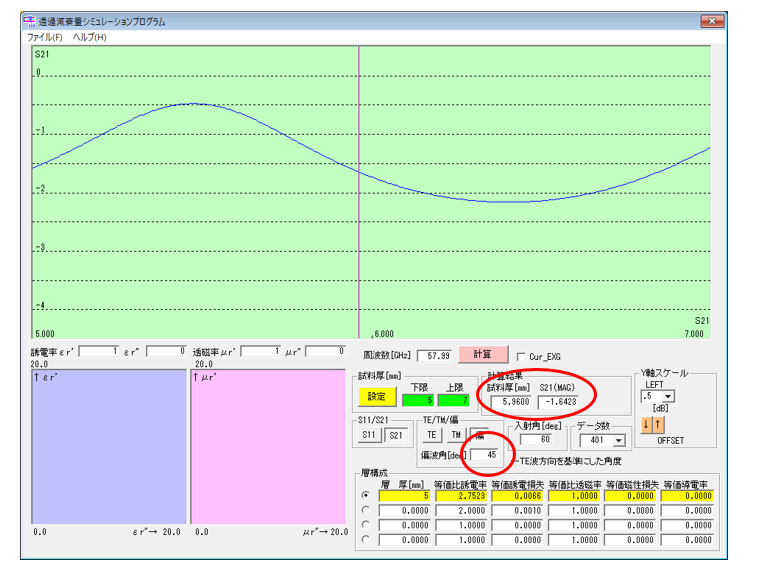
| 6.9. エンブレム、レドーム設計用 多層板透過減衰量シミュレーションソフトウェア(斜め偏波対応) [SFW05] | 6.10. バンパー評価システム [BES01] | ||
|
|
||
| Detail! | Detail! |
7. 電波吸収シート / 電波暗箱 / 電波暗室
| 7.1. 電波吸収シート(ピラミッド) [EMC80] | 7.2. 低周波は通過、高周波は吸収タイプ電波吸収シート [EMC81] | ||
|
|
||
| Detail! | Detail! |

| 7.3. 電波吸収パネル [EMC83] | 7.4. 電波暗箱 [ANB02] | ||
|
|
||
| Detail! | Detail! |

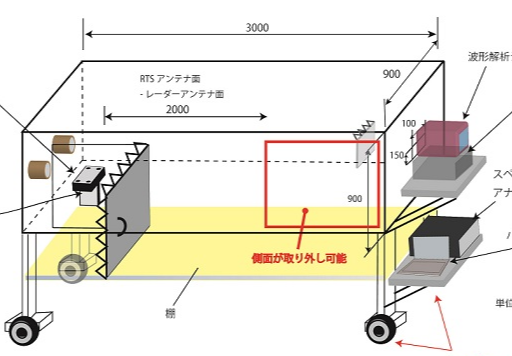
| 7.5. 電波吸収ボックス [EMC85/EMAB-79G-01] | 7.6. 3m法/10m法電波暗室 [EMA08] | ||
|
|
||
| Detail! | Detail! | ||
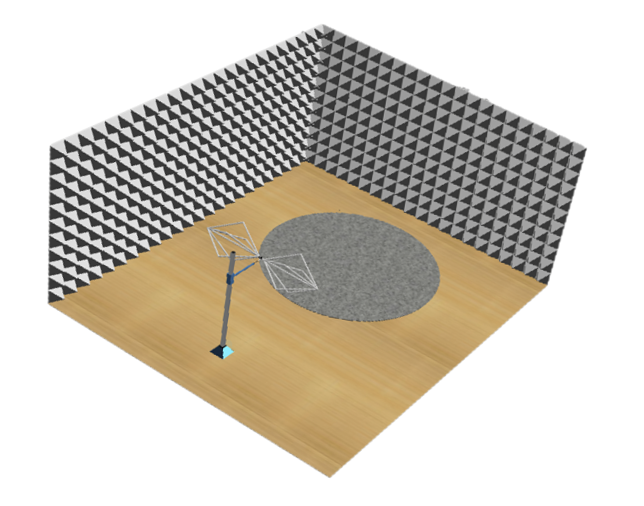
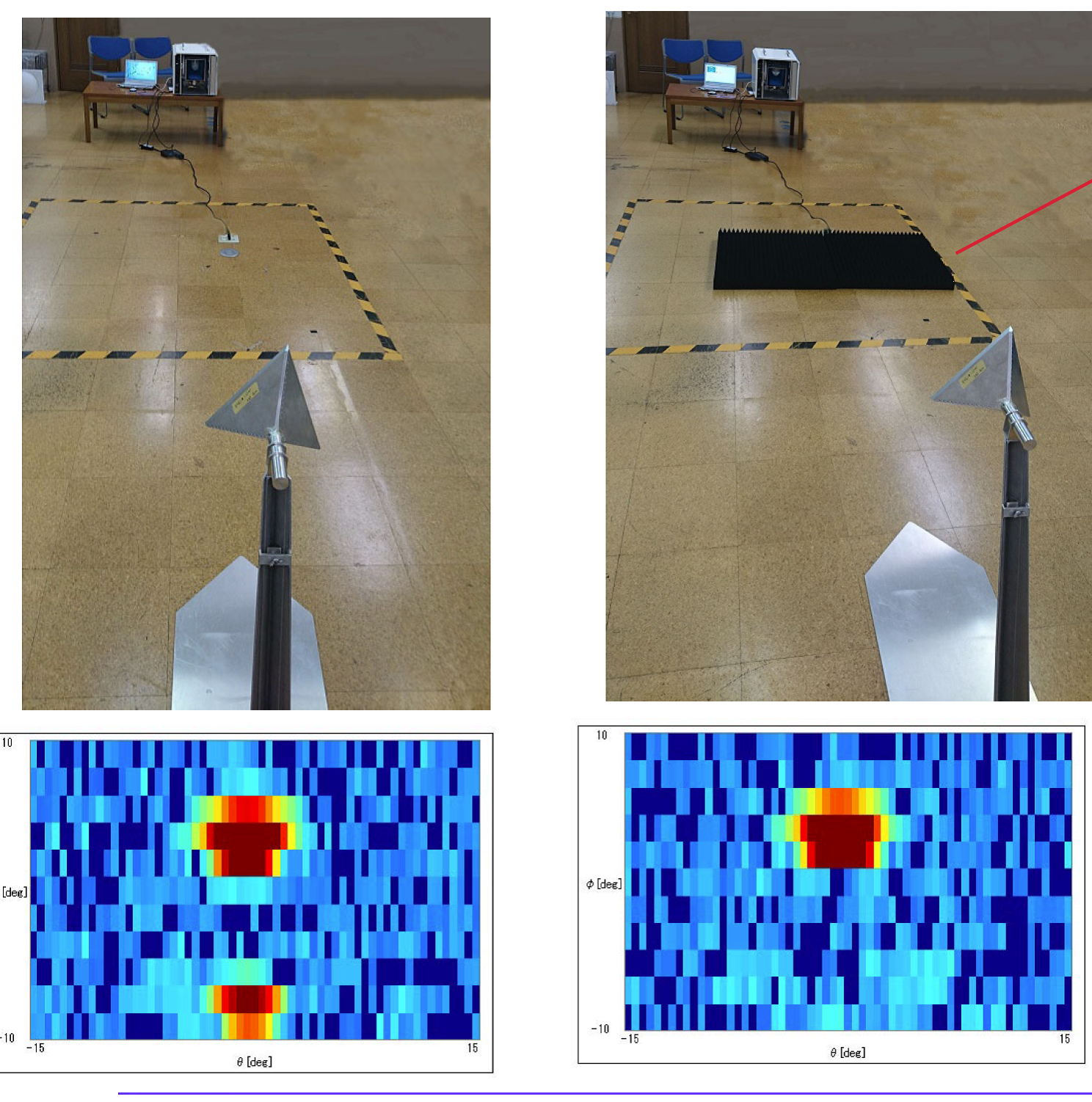
| 7.7. 自由空間定在波測定システム [FSSWM02] | |||
|
|||
| Detail! | |||